Antrieb
3 x M20 Motoren (omnidirektionaler Antrieb);
Freesky 980 KV BLDC;
Jeder Motor hat eine eigene closed-loop control, der Setpoint kommt aus der inversen Kinematik unseres Omni-Wheel Setups
Elektronik
Freely RC v2 AM32
450mAh 3s
Eigene SMD Platine
Sicherheits Soft-Switch (steuert Waffen- und Reifenmotoren Versorgung)
custom 5V Buck-Converter
3 custom H-Brücken (für jeden Motor)
450mAh 3s
Eigene SMD Platine
Sicherheits Soft-Switch (steuert Waffen- und Reifenmotoren Versorgung)
custom 5V Buck-Converter
3 custom H-Brücken (für jeden Motor)
Perceptron
RoboFetz 25/26
Lasst euch von den niedlichen Wackelaugen nicht täuschen: Bei seinem RoboFetz-Debüt bringt Perceptron einen Tech-Stack in die Arena, der seinesgleichen sucht. De facto alle Komponenten stammen aus Eigenentwicklung:
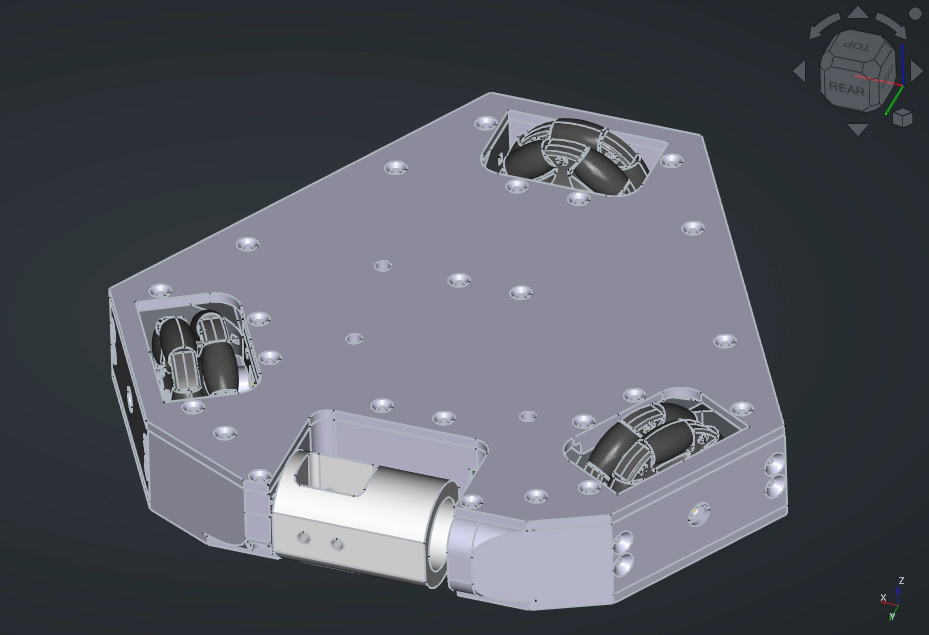
Mechanik & Panzerung: Komplett in FreeCAD konstruiert, setzt der Roboter auf einen holonomischen Antrieb mit drei omnidirektionalen Reifen für maximale Bewegungsfreiheit. Die Technik ist sicher in eine schockabsorbierende Voll-TPU-Panzerung verpackt, die Hauptwaffe wurde direkt am TU Arsenal aus Alu gefräst.
Custom Elektronik: Das Herzstück ist eine komplett selbst gefertigte SMD-Platine, inklusive eigener H-Brücken für die Motoren, einem custom 5V Buck-Converter sowie einem regelkonformen Soft-Switch.
Software & Steuerung: Gesteuert wird über einen ESP32-C6 per custom micro-ROS transport (inklusive eigenem Agent) über BLE. Firmware-Einstellungen (wie PID-Parameter oder Motor-Reversal) lassen sich live über ros2 param Calls anpassen und bleiben persistent über Reboots. Dank Behavior-Trees, Artificial Potential Fields und den ArUco-Markern auf dem Deckel kann Perceptron in der Arena völlig autonom agieren!
Open Source: Firmware, Software-Komponenten und (nach dem Event) alle CAD-Files findet ihr hier: GitHub: RoboFetz-Perceptron
Team
Schiener Marcel, Friedl Jakob, Reicher Matthias, Simon Jakob und Koçia Albi
Roboterart
Autonomous Drum Spinner
Gewicht
1030 Gramm
Waffenmaterial
Aluminium
Edelstahl
Edelstahl
Panzerungsmaterial
TPU